Like aquatic vegetation mapping, users should travel perpendicular to the longest shore or perpendicular to slopes to generate the best bottom hardness maps. Steep slopes present a challenge for bottom typing because the acoustic beam is intercepted at an angle. A soft bottom will typically be generated if the user records data parallel to a steep slope even if the slope is actually hard. Accurate bottom hardness readings on slopes require a perpendicular recording path.
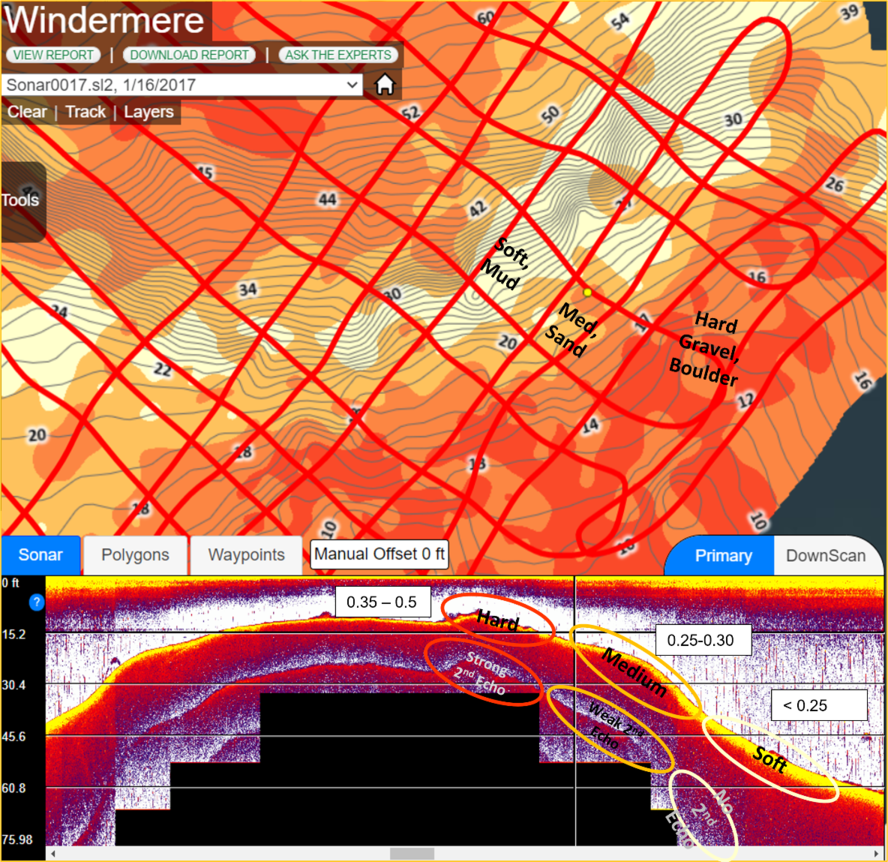
Example of a patch of hard bottom surrounded by softer overlying muck
The image shown below is a patch of hard bottom surrounded by softer overlying muck. Notice the double echo near the bottom of the sonar/echosounder image. The orange dot on the chart represents the location of the sonar/echosounder recording. Further, notice the more concentrated GPS trip path over the hard bottom features.